Last updated 10 April 2001
We have developed several prototype robot systems. Some of these are described here. We specialize in sensor integration, control systems, and path planning for autonomous and semi-autonomous systems. Contact us if you would like to have us help you with your intelligent instrumentation and robotic systems.
This page is always growing, please e-mail us if you have any suggestions and/or useful links.
You are visitor number:
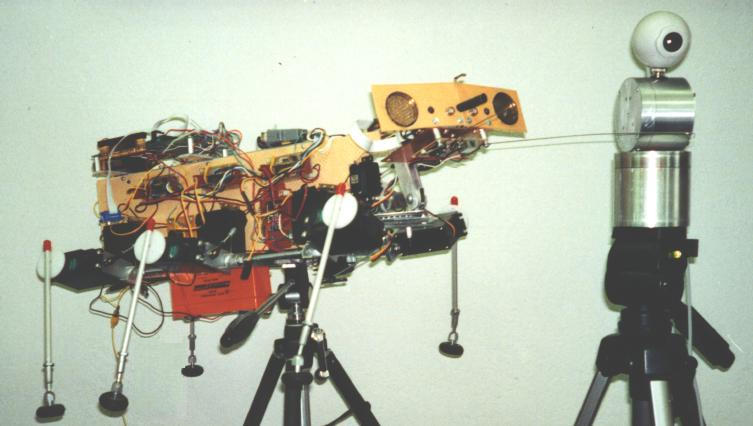
Our mascot Roboty on a test stand next to ROCI.
Roboty was featured on the cover of the Feb 1997 issue of Dr. Dobbs Journal
![]() ROCI, a remotely controlled camera
ROCI, a remotely controlled camera
![]() How do the different kinds of batteries
perform ?
How do the different kinds of batteries
perform ?
![]()
![]() RoboPilot, Palm Pilot software to
control a Robot.
RoboPilot, Palm Pilot software to
control a Robot.
![]() I stumbled across this interesting
demonstration, by
Noel Rode (noel@dgs.monash.edu.au),
of how the MIT robot Genghis walks (zipped binaries for DEC, SUN, SGI, Linux
and DOS, 393Kb).
I stumbled across this interesting
demonstration, by
Noel Rode (noel@dgs.monash.edu.au),
of how the MIT robot Genghis walks (zipped binaries for DEC, SUN, SGI, Linux
and DOS, 393Kb).
You should definitely also know about:
They are a great resource for mechanical parts, metal and plastic stock, etc.
![]()
Song, S-M, and K.J. Waldron, 1989; Machines That Walk: The Adaptive Suspension Vehicle, MIT Press, Cambridge Mass, 314 pages, ISBN 0-262-19274-8
And if merely walking isn't challenging enough for you:
Raibert, M.H., 1986; Legged Robots That Balance, MIT Press, Cambridge Mass, 233 pages, ISBN 0-262-18117-7
And of course there is the modern classic (not much on walking
robots, but generally useful),
Jones, J.L. and A.M. Flynn, 1993; Mobile Robots, Inspiration to
Implementation, A K Peters, Wellesley Mass, 349 pages,
ISBN 1-56881-011-3
![]() I see lots of questions on the net about how to
control devices from the PC
parallel or serial port. Here is a free copy of an excellant book by
Tim Hendtlass
on Real Time Forth that has this info and more. (This is a
zipped Postscript file, not HTML, 1012K).
I see lots of questions on the net about how to
control devices from the PC
parallel or serial port. Here is a free copy of an excellant book by
Tim Hendtlass
on Real Time Forth that has this info and more. (This is a
zipped Postscript file, not HTML, 1012K).
You might also want to look at my
recent Forth Dimensions
article.
|
|